人工智能教程 - 数学基础课程1.1 - 数学分析(一)-28-31 参数方程,极坐标,不定型和洛必达法则
斜边长度平方 (hypotenuse)
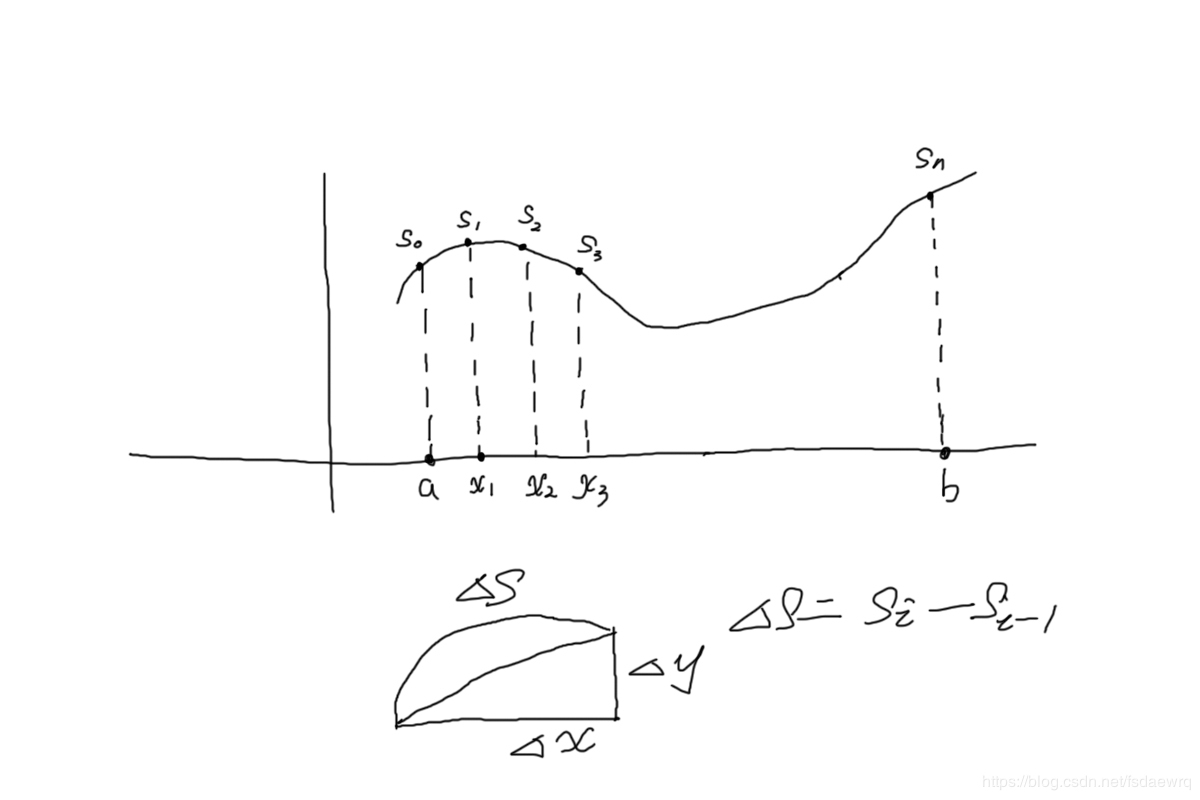
(ΔS)2=(Δx)2+(Δy)2(\Delta S)^2 = (\Delta x)^2 +(\Delta y)^2(ΔS)2=(Δx)2+(Δy)2
(dS)2=(dx)2+(dy)2(dS)^2 = (d x)^2 +(d y)^2(dS)2=(dx)2+(dy)2
simplify: dS2=dx2+dy2dS^2 = d x^2 +d y^2dS2=dx2+dy2
ds=1+(dy/dx)2dxds = \sqrt{ 1+(dy/dx)^2}dxds=1+(dy/dx)2dxArclength:(total Sn−S0S_n-S_0Sn−S0 )
=∫ab1+(dy/dx)2dx=\int_{a}^{b} \sqrt{1+(dy/dx)^2}dx=∫ab1+(dy/dx)2dx
=∫ab1+f′(x))2.dx=\int_{a}^{b} \sqrt{1+f'(x))^2}.dx=∫ab1+f′(x))2.dx
极坐标和极坐标面积Arc length:
ds2=dx2+dy2ds^2 = dx^2+dy^2ds2=dx2+dy2
ds=(dxdt)2+(dydt)2.dtds = \sqrt{(\frac{dx}{dt})^2+(\frac{dy}{dt})^2}.dtds=(dtdx)2+(dtdy)2.dt
dx/dt=−asint;dy/dt=acostdx/dt=-asint;dy/dt=acostdx/dt=−asint;dy/dt=acost
ds=(−asint)2+(acost)2.dtds = \sqrt{(-asint)^2+(acost)^2}.dtds=(−asint)2+(acost)2.dt
a2dt=adt\sqrt{a^2} dt=adta2dt=adt
ds/dt=a speed
(d2xdt2)=(ddt)2x(\frac{d^2x}{dt^2}) = (\frac{d}{dt})^2x(dt2d2x)=(dtd)2x
=ddt(−asint)=\frac{d}{dt}(-asint)=dtd(−asint)
polar coordinates
totalA=πa2total A = \pi a^2totalA=πa2
ΔA=ΔΘ2ππa2\Delta A =\frac{\Delta \Theta}{2 \pi} \pi a^2ΔA=2πΔΘπa2
(r=r(Θ))(r=r(\Theta ))(r=r(Θ))
A=∫Θ1Θ212r2dΘA = \int_{\Theta _1}^{\Theta _2}\frac{1}{2}r^2d\ThetaA=∫Θ1Θ221r2dΘ 不定型和洛必达法则L’Hopital’s Rule
提供计算极限的捷径 conventinet way to calculate limits Ex1: limx→1x10−1x2−1\lim_{x\rightarrow 1} \frac{x^{10}-1}{x^2-1}limx→1x2−1x10−1 传统的方法: =limx→1(x10−1)/(x−1)(x2−1)/(x−1)=\lim_{x\rightarrow 1}\frac{(x^{10}-1)/(x-1)}{(x^2-1)/(x-1)}=limx→1(x2−1)/(x−1)(x10−1)/(x−1)f(x)=x10−1;f(1)=0f(x)=x^{10}-1;f(1)=0f(x)=x10−1;f(1)=0
f′(x)=10x9f'(x)=10x^9f′(x)=10x9
原式=10x92x=102=5=\frac{10x^9}{2x}=\frac{10}{2}=5=2x10x9=210=5
洛必达方式 limx→af(x)g(x)=limx→af(x)/(x−a)g(x)/(x−a)=limx→af(x)−f(a)x−alimx→ag(x)−g(a)x−a\color{red}\lim_{x\rightarrow a}\frac{f(x)}{g(x)}=\lim_{x\rightarrow a} \frac{f(x)/(x-a)}{g(x)/(x-a)}=\frac{\lim_{x\rightarrow a} \frac{f(x)-f(a)}{x-a} }{\lim_{x\rightarrow a} \frac{g(x)-g(a)}{x-a}}limx→ag(x)f(x)=limx→ag(x)/(x−a)f(x)/(x−a)=limx→ax−ag(x)−g(a)limx→ax−af(x)−f(a) (f(a)=g(a)=0) =f′(a)g′(a)\color{red}=\frac{f'(a)}{g'(a)}=g′(a)f′(a)(works of g’(a)不等于0) L’Hopital’s Rule(VERSION 1) limx→af(x)g(x)=limx→af′(x)g′(x)\color{red}\lim_{x\rightarrow a}\frac{f(x)}{g(x)}=\lim_{x\rightarrow a}\frac{f'(x)}{g'(x)}limx→ag(x)f(x)=limx→ag′(x)f′(x) 和逼近法 approximations 结果一致作者:KuFun人工智能